The UAV Team
I have been leading the UAV team since 2021, and the team consists of 5-15 graduate students in the Computational Engineering & Robotics Lab (CERLAB) at Carnegie Mellon University. Our primary objective is leveraging our UAV technology expertise and developing algorithms to address real industrial projects. We specialize in tasks such as tunnel inspection, construction site mapping, and window frame inspection. Our team collaborates closely with prominent industrial partners (YKK AP Inc., Obayashi Corporation, TOPRISE CO., LTD, etc.) to provide innovative solutions.
Team Robot Gallery
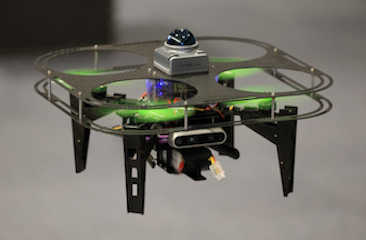
Camera LiDAR Quadcopter I

Camera LiDAR Quadcopter II
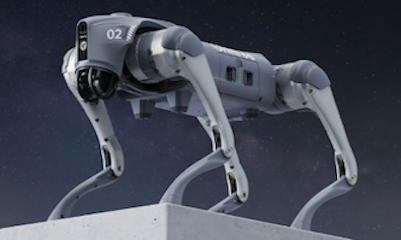
Unitree Go2 Legged Robot

F330 Customized Quadcopter

Q250 Customized Quadcopter

Uvify IFO-SX Quadcopter

DJI Matrice 100

Clearpath Husky UGV

Boston Dynamics Spot
Team Activity Highlights
03/2025: MechE master thesis symposium. One of our team member (Haoyu Shen) won the best poster awards! Pittsburgh, PA

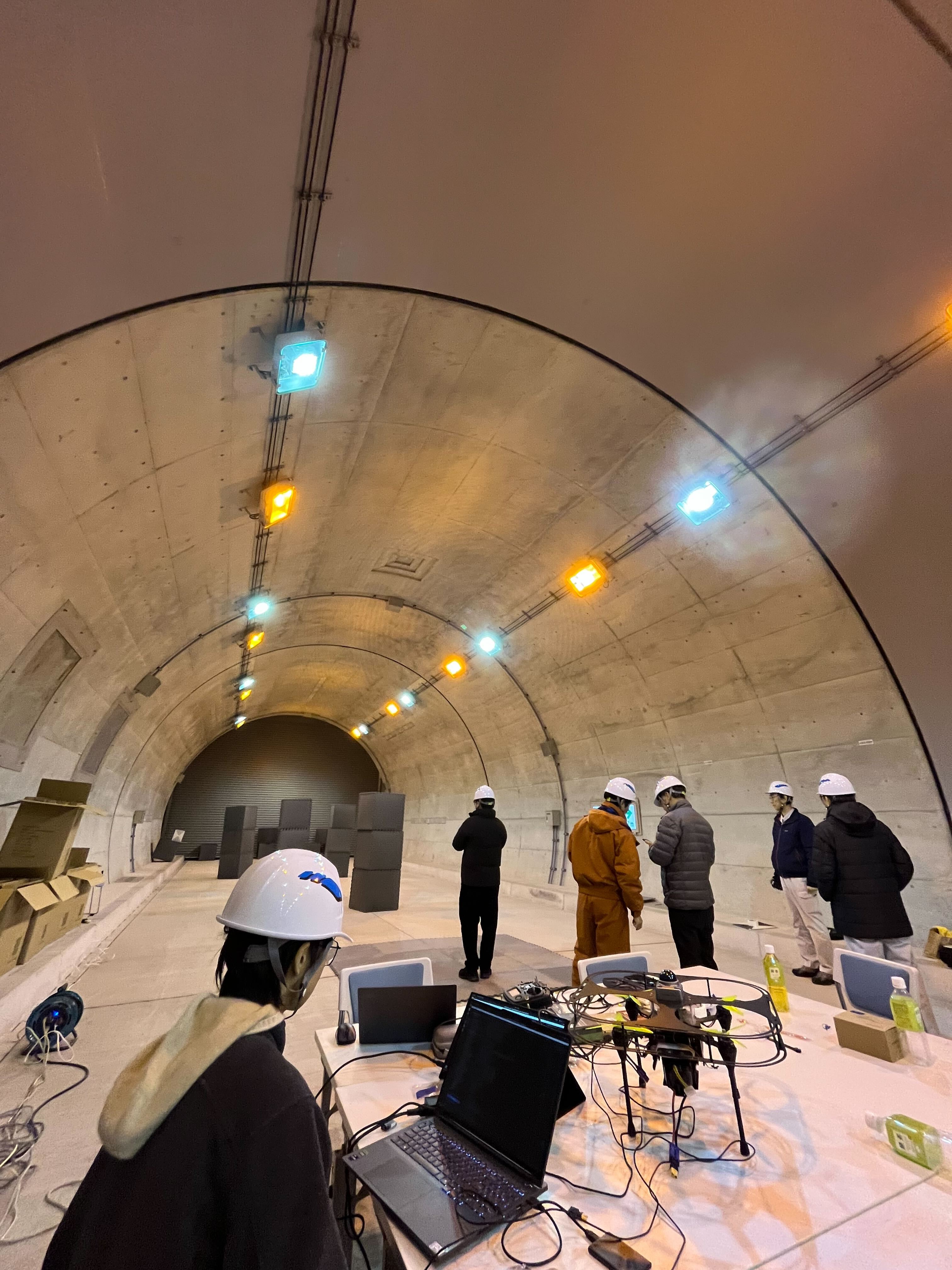
12/2024: The team successfully completing the autonomous inspection demo for TOPRISE CO., LTD in the tunnel. Fukushima, Japan.

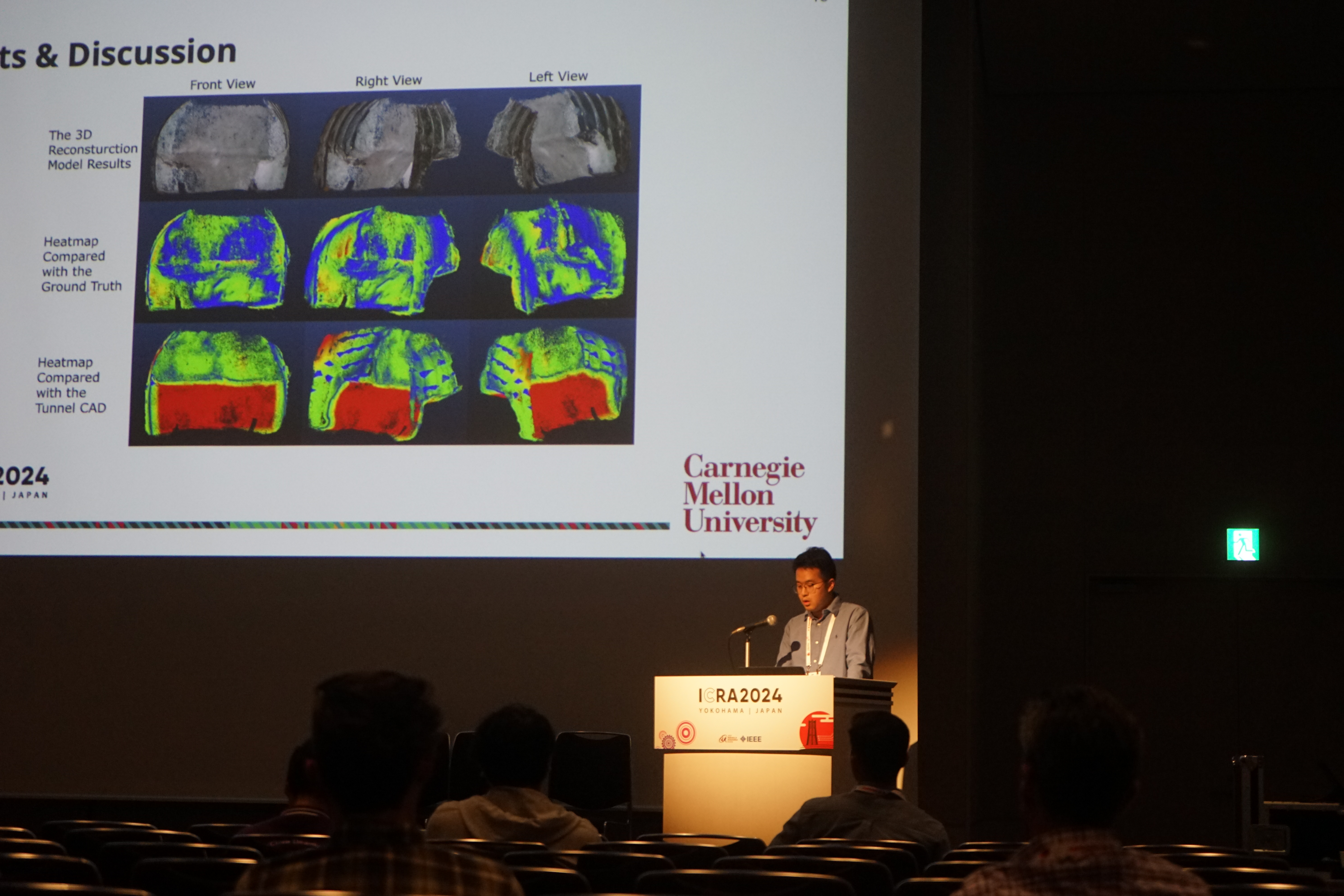
05/2024: The team attending and presenting at the ICRA2024 conference. Yokohama, Japan.

05/2023: The team attending and presenting at the ICRA2023 conference. London, UK.

03/2023: MechE master thesis symposium. Two team members (Xiaoyang and Parth) won the best poster awards! Pittsburgh, PA

12/2022: The team successfully completing the autonomous inspection demo for Obayashi Corporation and TOPRISE CO., LTD in the tunnel. Otaru, Japan



10/2022: The team conducting experiments in the Rays Hill Tunnel and presenting to TOPRISE CO., LTD. Breezewood, PA



05/2022: The team attending and presenting at the ICRA2022 conference Philadelphia, PA

11/2021: The team celebrating the Thanksgiving Day in the Primanti Bros. Pittsburgh, PA